We congratulate the winners Urban Robotics Lab. @ KAIST for Lidar Single-session, and Autonomous Systems Lab @ ETHZ for Lidar Multisession leaderboards. Additionally we congratulate XR Penguin for winning both vision only single + multi-session awards.
The cash award winners are
- Lidar Single-session: Hyungtae Lim, Daebeom Kim, Gunhee Shin, Daehan Lee and Hyun Myung (Urban Robotics Lab @ KAIST): 3000 USD
- Lidar Multi-session: Andrei Cramariuc (Autonomous Systems Lab @ ETHZ): 4000 USD
- Vision only Single-session (Best academic submission): Hyunjun Lim and Hyun Myung (URL @ KAIST): 1000 USD
- Vision only Multi-session: Andrei Cramariuc (Autonomous Systems Lab @ ETHZ): 2000 USD
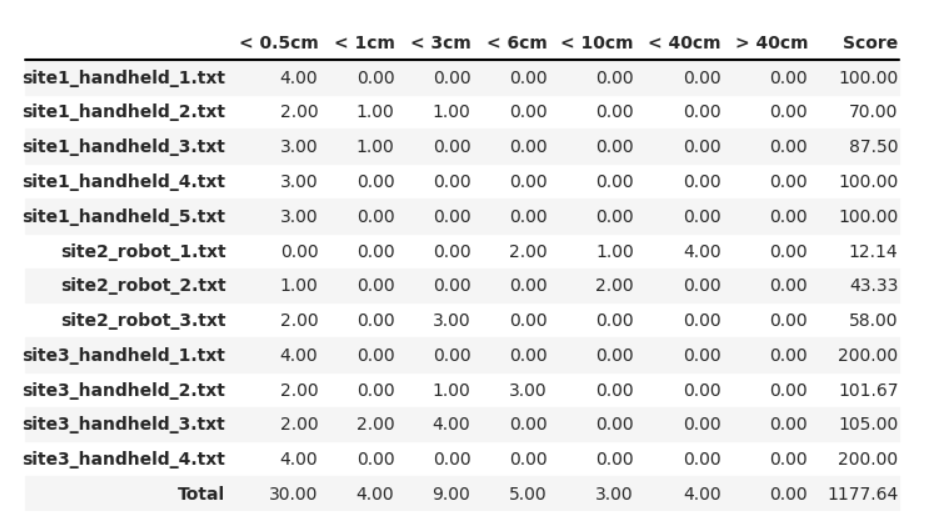
Score Computation
After transformation of the estimates from the imu frame to the pole tip, we aligned the trajectory with the sparse ground truth points using a rigid transformation. Then the ATE for each point is computed (we rely on the evo script). Depending on the error, each ground truth point adds a certain amount of points to the score:
- < 0.5cm → 20 points
- < 1cm → 10 points
- < 3cm → 6 points
- < 6cm → 5 points
- < 10cm → 3 point
- < 40cm → 1 points
- > 40cm → 0 points